Interprétations
II - Traitements de données de capteurs - Part 4
4 - Interprétation
Interpréter = Calculer une information plus complexe à partir d’une analyse simple.
Ces traitements dépendent du dispositif ou de l’application, ils ne sont pas systématiquement nécessaires.
Liste d'exemples d'interprétations
-
Fenêtre de validité, élimination de détections superflues (onebang)
-
Localisations / Directions
01 • Quadrillage par plusieurs capteurs identiques
02 • Bras de levier - Localisation sur un axe
03 • Bras de levier - Localisation sur une surface
04 • Localisation au cours du temps : direction -
Comptages et détections de sens
01 • Comptage par capteur unique
02 • Sens de passage, par deux capteurs
03 • Comptage / Décomptage de passages
04 • Sens de rotation et comptage de crans -
Calculs et temporalité
01 • Analyse de fréquence
02 • Calcul de vitesse
03 • Intégration mathématique
04 • Moyenne récursive - Adaptation au contexte - Vérification de la validité d'un capteur par un autre
01 • Éviter les fausses détections de triche et la désynchronisation
02 • Éviter les fausses détections de parasitage
03 • Accroître la sensibilité / Compléter la captation
Les trois types de traitements sont parfois cumulés sur les mêmes données de capteur : filtrage, puis analyse, puis interprétation. Cependant, si les données sont propres, le filtrage n'est pas nécessaire. L'interprétation repose sur une analyse préalable et permet d'obtenir plus d'informations en combinant, modifiant, cumulant les résultats de l'analyse.
Nous ne verrons que deux exemples en détail, comptage et calcul de vitesse. L'utilisation du onebang a déjà été abordée auparavant.
Comptages, scores
Objet counter
- Sans argument :
- Pas de maximum fixe, le compte augmente tant qu'il y a des bangs.
- Remise à zéro avec un bang sur la 3e entrée.
- Le minimum peut être spécifié par un message indépendant
minousetmin- voir les différences dans le help.
- Avec des arguments :
- 2 nombres = min et max, le compteur tourne en boucle entre ces limites.
- Le sens peut de plus être précisé - cf help.
- Si le max est atteint, le nombre 1 sort sur la 3e sortie, signal utilisable avec un
sel 1. Attention, nombre 0 au début du compte suivant. - Carry = nombre de fois que le max est atteint. La 4e sortie indique ce comptage supplémentaire, pratique pour comptabiliser des parties dans un jeu en plus des scores individuels.

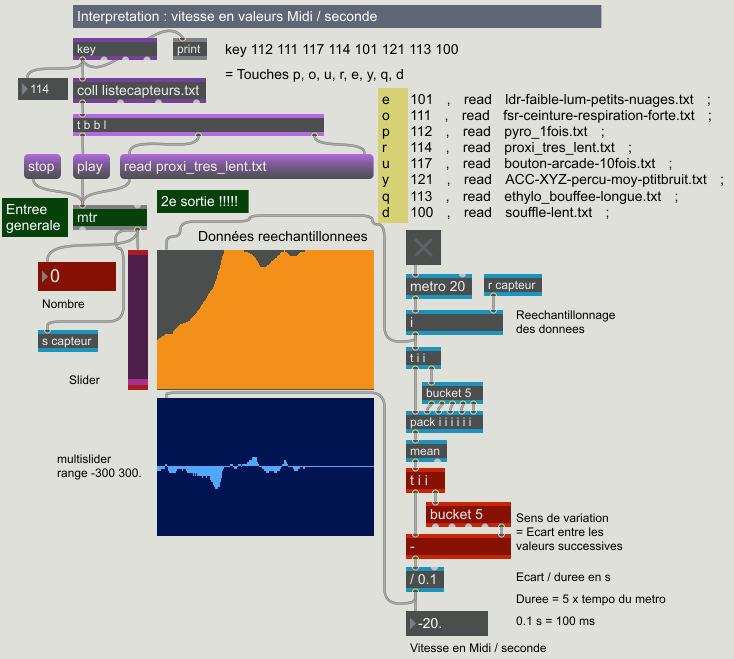
Calcul de vitesse
Vitesse = distance / durée
Distance = valeur courante - valeur précédente
Pour obtenir une distance (ou un angle) réelle à partir de données Midi : calibrer le capteur auparavant, établir quelle valeur correspond à quelle mesure réelle ; appliquer une formule de mise à l'échelle proportionnelle ou de linéarisation, selon le type de capteur.
Dans cet exemple, les valeurs sont directement utilisées sans conversion préalable en distance réelle.
La vitesse obtenue donne une information valable sur l'agitation et le sens des mouvements, même si elle n'est pas exprimée en mètre/seconde.


- Rééchantillonnage régulier des données.
- Mémorisation de quelques valeurs précédentes.
- Calcul de distance parcourue = valeur la plus récente - 5e précédente (plus stable que juste la précédente)
- Division par la durée passée à la parcourir = 50 ms, durée connue car cadencée par le metro.
Remarquez le joli décalage de phase en les oscillations des données et celles de vitesse.
Comme pour l'analyse de sens de variation, il peut être intéressant d'intercaler une moyenne entre les données rééchantillonnées et le calcul de vitesse.